






谢谢主持人的介绍,非常荣幸能够参与脑客中国这个脑科学活动中,成为第三十一位讲者。今天给大家带来的题目是神经振荡在人类空间记忆和恐惧习得中的作用机制,内容主要是我们这几年开展的一些工作。
01研究基础
我们人脑是由非常多的神经元所组成,每个神经元之间通过轴突相连构成了一个非常庞大的神经网络,神经元之间的传导通常是利用动作电位。
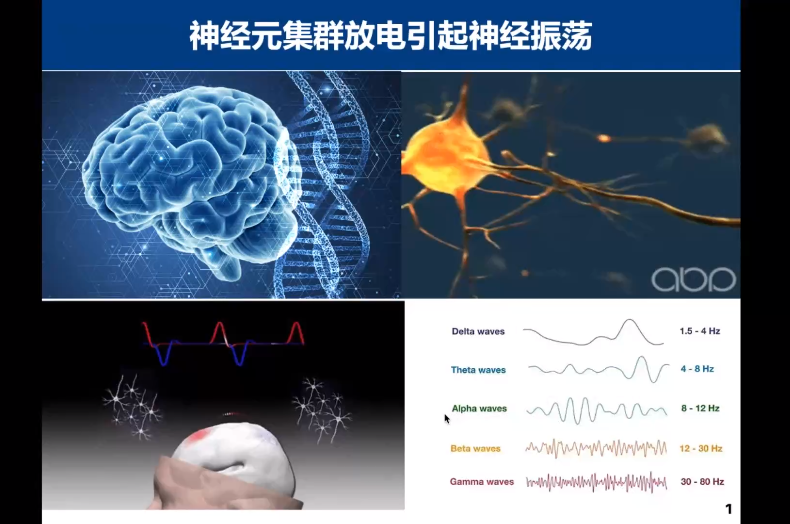
复杂的行为往往需要一群神经元集群的放电来支撑,这群神经元集群的放电会导致我们细胞膜的膜电位发生一些改变,有时是兴奋的,有时是抑制的。如左下图所示,对应的膜电位就是兴奋会升高、抑制会降低。
所以在一群神经元集群周围通过放电会形成了不同节律的震荡。如右下图所示,根据震荡的周期,将它们命名为Delta、Theta、Alpha等以及更高频的一些震荡。很多的技术手段都可以记录这些信号,包括头皮脑电这些单电机的信号。

在大脑研究中,研究尺度的跨度是非常大的,上面这个轴可以看到,从最左边的一米到最右边的纳米。宏观尺度一般使用功能磁共振、脑电图等设备,研究的尺度是厘米、毫米级的;微观尺度是利用显微成像、光学成像等技术基础,可以看到一些疏通肌,甚至突触形态的改变,它的尺度就是微米级和纳米级的;还有介观尺度,这个尺度基本上就是探讨神经元水平,包括神经元群水平的一些特性,它的尺度基本上在毫米和微米级的。我们所感兴趣的就是在中间这个介观尺度上的一些神经活动的特征。
02空间导航行为
今天给大家主要介绍一下人的两个功能性功能的特点。首先是导航行为,导航行为是跨物种、具有非常强保守性的,不管是动物觅食还是我们人日常生活中的通勤行为,都涉及到导航行为的规划。比方说这个图上展示的从A点到B点有两条不同的路线,在不熟悉场景的情况下,我们会选择不一定是最优的路线,但是当我们对环境非常熟悉的情况下,我们会选择从起点到终点最佳的路线,这条最佳路线不一定是距离最短,但一定是效率最高的。比如高峰期的情况下,我们会选择避开最短路线,可能会选择一条稍微长一点但是通行时间比较短的路线。
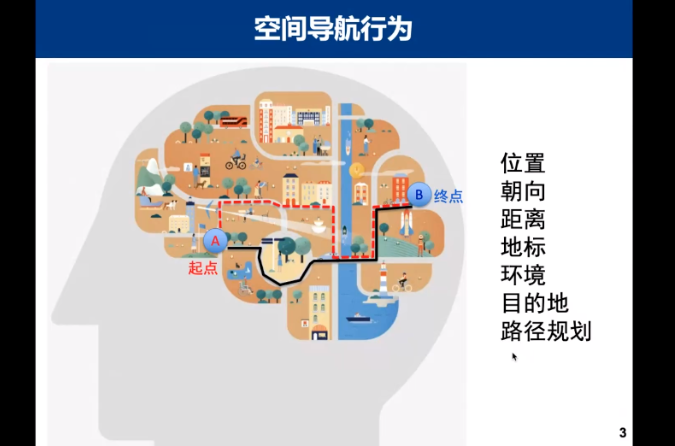
在整个导航规划过程中,我们发现有很多的信息大脑需要处理,包括它的位置、朝向、距离等信息,这些外界的刺激会在我们大脑中进行整合,因此我们会根据所接收到的信息规划我们的路线选择。
关于空间导航行为的研究历史实际上已经很长了,上世纪五十年代,Tolman就在动物上进行了相关研究。左图就可以看到,用s表示起点,reward表示终点,将齿类动物放在起点。一开始它不知道哪条路可以过去,所以它从起点出来之后,他可能会搜索一些路线,发现了这样一条路线——先上去,然后左拐再直行、最后右拐到达reward。
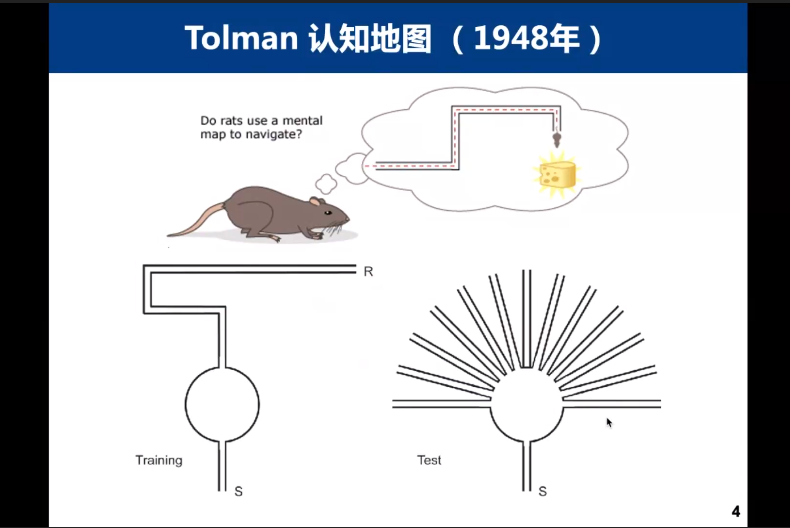
当小鼠学会这么一个行为后,它会获得起点和reward地点之间的相对位置关系,再通过关闭之前路线的最初管道,开启诸多不同方向上的管道,小鼠会根据它之前在大脑内所形成的起点和reward地点的相对位置关系从这新开的这些管道中选择一条最短的到达reward地点。
这个行为引发了Tolman的思考。他认为小鼠可能在大脑内已经形成了一种地图,那么这个地图刻画出了起点到终点之间的这种位置关系,他将它称为connection map,也就是我们说的认知地图。
注:上述内容在征得王亮老师同意后,在不改变原意的情况下进行的部分文字整理。观看完整视频内容请扫描下方二维码或点击阅读原文观看。

扫描二维码
观看完整视频
